Macro-robotique médicale
Les premiers robots chirurgicaux sont apparus à la fin des années 1980.
Ils assistent ou remplacent les chirurgiens lors des opérations, en permettant une précision que ne pourrait avoir le chirurgien avec ses instruments traditionnels.
Même si le terme robot est employé, il s'agit souvent de télémanipulation plutôt que de robotique. Ce sont alors les mouvements réalisés par le chirurgien qui sont transmis, et non pas un robot préprogrammé qui opère.
Premières procédures chirurgicales utilisant des robots industriels
1989 : Neuromate, robot à bras articulé associé à un ordinateur (société IMMI), pour la neurochirurgie
1992 : Robodoc®, premier robot dédié aux opération de la hanche (société Integrated Surgical Systems)
2000 : Caspar est un système actif qui opère seul (genoux, hanche) en fonctions de paramètres déterminés en amont par le chirurgien. S'il rencontre un problème imprévu, le chirurgien prend le relais.
Téléchirurgie
1998 : Zeus® (Computer Motion puis Intuitive Surgical), premier système maître–esclave pour une intervention de téléchirurgie.
le chirurgien est installé devant son poste de travail (maître)et le robot opère grâce à ses des bras articulés (esclave).
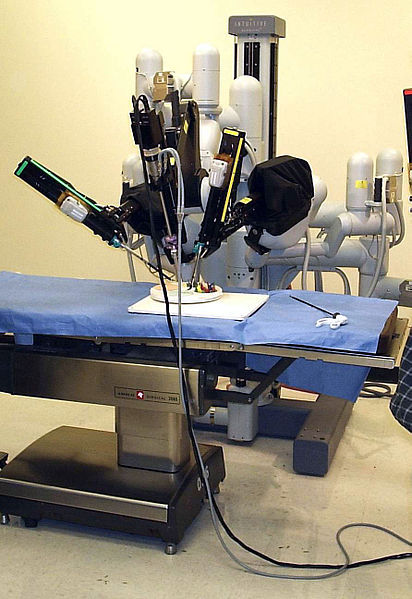
2000 : Da Vinci® (Intuitive Surgery, Californie), robot d'aide à la cœliochirurgie.
Le chirurgien est assis devant le poste de travail et opère grâce à deux manipulateurs et un pédalier.
Ressource associée
La robotique au bloc opératoire
Présentation illustrée des différents robots utilisés en France et en Europe, ainsi que des avantages qu'ils apportent aux patients et aux utilisateurs.
La robotique au bloc opératoire, Solenne TAILLÉ et Julien DIDIER, UV Projet DESS "Technologies Biomédicales Hospitalières",
UTC, 2000, pp25
URL : http://www.utc.fr/~farges/DESS_TBH/99-00/projets/robots/robots.htm