Rovers
Dans les années 90, la Nasa souhaite effectuer sur Mars des relevés géophysiques et météorologiques et développe différents rovers (ou astromobiles).
1996 Sojourner
C'est le premier robot envoyé sur Mars. Il pèse 10,6 kg, et mesure 65 cm sur 48 cm, avec une hauteur de 30 cm. L'énergie nécessaire est fournie par un capteur solaire. Sojourner possède 6 roues motrices, des capteurs, des caméras frontales et des faisceaux lasers pour évaluer les accidents du terrain.
Quand il n'est pas en mission sur la surface de Mars, il rejoint la sonde Pathfinder, qui abrite un ordinateur et des composants électroniques. Cette sonde transmet les informations entre le robot et l'équipe à terre.
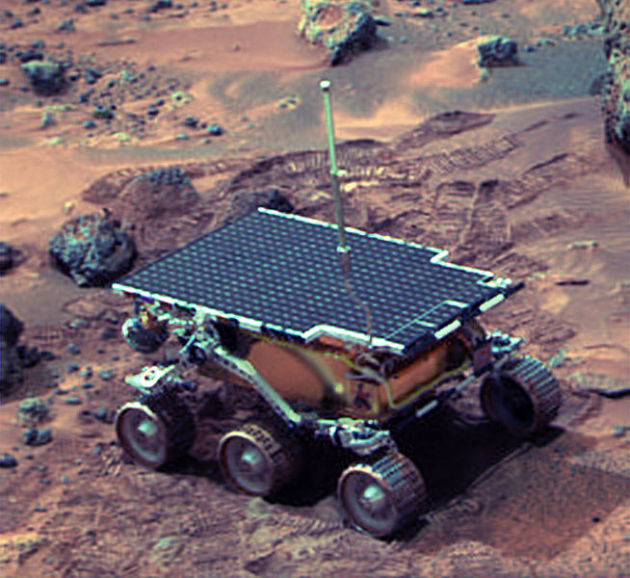
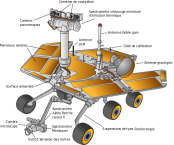
2004 Spirit et Opportunity
Ces deux robots, appelés MER (Mars Exploration Rover), ont atteint Mars en 2004. Ils pèsent environ 185 kg et fonctionnent avec l'énergie solaire. Ils sont équipés de caméras, et d'un bras articulé avec entre autres un spectomètre et un outil pour abraser la roche. Ils recherchent d'éventuelles anciennes traces d'eau sur Mars.
Ce type de robot ne nécessite plus la présence d'une base annexe pour communiquer.
2011 Curiosity
Curiosity quitte la Terre en novembre 2011 et se pose sur Mars en août 2012. Il a une masse de 899 kg pour 3 mètres de long. Il est beaucoup plus lourd que les robots MER et équipé de 75 kg d'instruments scientifiques, ainsi que d'un bras manipulateur de 2,20 mètres.laboratoire mobile prévu pour affronter des dénivelés de 45°, et ce durant 23 mois au minimum
Ce laboratoire est conçu pour se déplacer sur des dénivelés de 45°, et être actif pendant 23 mois au minimum.
Curiosity doit analyser le sol et l'atmosphère de la planète afin que les scientifiques établissent si cet environnement a pu être propice à la vie.
