1854-1993 : Inventions et créations lexicales déterminantes
1854 Algèbre booléenne
George Boole, mathématicien et logicien anglais (1815--1864) fonde un système mathématique fondé sur deux valeurs, 0 et 1 : tout processus logique est composé d'un ensemble d'opérations logiques simples. Ce système va permettre la conception des ordinateurs.
1923 Invention du mot "robot"
Le mot robot est un néologisme créé par Karel Capek dans sa pièce de théâtre Rossum's Universal Robots. Il est inspiré du mot tchèque robota qui signifie travail ou corvée.
(Robota provient lui-même du gothique arbeiths qui signifie travail, peine chagrin, détresse (Grange, 1981).
1942 Les trois lois de la robotique
L'écrivain de science-fiction Isaac Asimov écrit et publie des nouvelles mettant en scène des robots. Il imagine alors dans une de ses nouvelles les trois lois de la robotique, pour réglementer le comportement des robots par rapport à l'être humain.
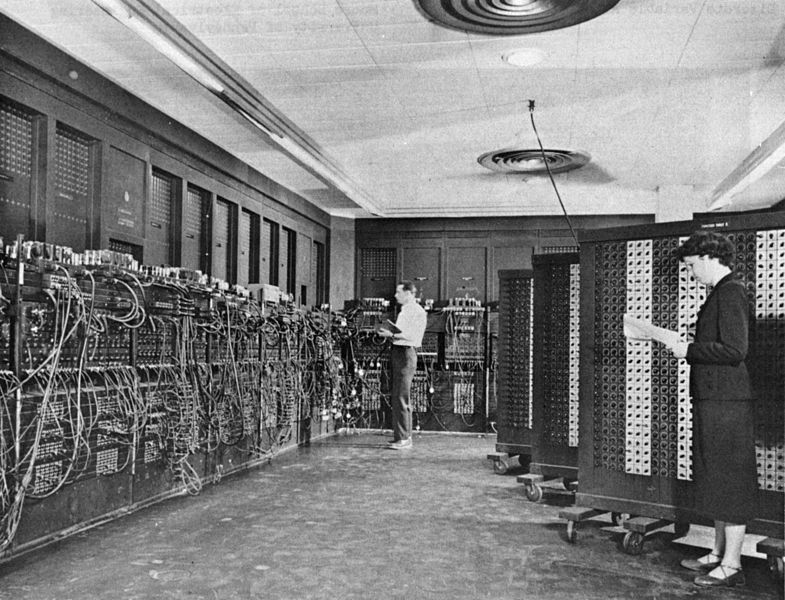
1946 L'ENIAC, premier ordinateur
L'Eniac (Electronic Numerator, Integrator, Analyzer and Computer) est créé en 1946 par John Presper Eckert et John W. Mauchly, en Pennsylvanie. Cette invention est à l'origine destinée à l'armée américaine, afin de calculer la trajectoire des obus.
L'Eniac nécessite un local de 150 mètres carrés, et pèse environ 30 tonnes. Il calcule une trajectoire en une vingtaine de secondes, après deux jours de programmation (il fallait tourner à manuellement des milliers de commutateurs et brancher des centaines de câbles).
1947 Invention du transistor
Le transistor est inventé en par trois ingénieurs américains (Bell Laboratories) : John Bardeen, Walter Brattain et William Schockley.
Ce petit composant dirige et régule le courant électrique. Petit, léger et fiable, il fonctionne avec des tensions faibles et est à l'origine de l'électronique. Il permet de réduire la taille des ordinateurs.
1948 Naissance de la cybernétique
Scientifique américain, Norbert Wiener (1894-1964) publie en 1948 Cybernetics or Control and Communication in the Animal and the Machine, où il définit la cybernétique.
Il considère que le monde est constitué de systèmes en interaction (échanges de matière, d'énergie, ou d'information), qu'ils soient vivants ou non-vivants. Le cerveau est considéré comme une machine logique (analogie ente l'humain et la machine dans le domaine de la communication).
Pour Norbert Wiener, la communication, le signal, l'information, et la rétroaction sont des notions de base de la cybernétique. Les mécanismes de rétroaction déterminent l'autonomie des machines.
Une approche cybernétique implique une analyse globale des éléments d'un système et de leurs interactions.
1950 Test de Turing
Avec le développement de l'informatique, Alan Turing (1912-2012) s'interroge sur le traitement par l'informatique des connaissances, du raisonnement et surtout sur la notion d'apprentissage pour progresser dans des tâches définies.
Il conçoit un test, le « jeu de l’imitation», pour déterminer si une machine peut être qualifiée de"pensante" : un humain échange à l'aveugle avec un autre humain et une machine, et doit reconnaître chacun des deux par leurs réponses.
Ce test, encore très souvent cité, est aujourd'hui aussi très controversé : "les machines n'apparaissent douées d’intentionnalités pour Turing que si elles nous trompent sur leur véritable nature de machines" (Grimaud, 2015).
1956 Emploi de l'expression Intelligence artificielle (I.A.)
L'université de Dartmouth (Etats-Unis) réunit en 1956 des scientifiques pour étudier« les machines pensantes ». A l'issue d'un atelier de travail, John McCarthy et Marvin Lee Minsky proposent le terme d'intelligence artificielle pour définir une discipline scientifique « dont le but est de faire faire par une machine des tâches que l'homme accomplit en utilisant son intelligence».
.
1963 General Problem Solver
Les chercheurs américains Herbert Simon et Alain Nevell conçoivent un programme informatique capable de résoudre des théorèmes mathématiques simples en appliquant un schéma de raisonnement.
Même s'il reste un programme de recherche, l'élaboration de ce système de résolution de problème est un des maillons essentiels de l'histoire de l'intelligence artificielle.
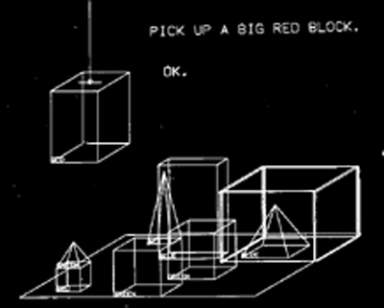
1970 Programme SHRDLU
Ce programme permet à un opérateur utilisant un langage naturel d'intervenir dans un « micromonde» : des blocs géométriques colorés et de différentes tailles représentés sur un écran.
C'est le premier programme capable de réflexivité dans un environnement toutefois très simple.
Exemple de dialogue :
« Person: PICK UP A BIG RED BLOCK.
Computer: OK. (does it)
Person: GRASP THE PYRAMID.ns
Computer: I DON'T UNDERSTAND WHICH PYRAMID YOU MEAN.
Person: FIND A BLOCK WHICH IS TALLER THAN THE ONE YOU ARE HOLDING AND PUT IT INTO THE BOX.
Computer: BY "IT", I ASSUME YOU MEAN THE BLOCK WHICH IS TALLER THAN THE ONE I AM HOLDING.
Computer: OK. (does it)
Person: WHAT DOES THE BOX CONTAIN?
Computer: THE BLUE PYRAMID AND THE BLUE BLOCK.
Person: WHAT IS THE PYRAMID SUPPORTED BY?
Computer: THE BOX.
Person: HOW MANY BLOCKS ARE NOT IN THE BOX?
Computer: FOUR OF THEM. »
(Intégralité en ligne.)
1990 Une intelligence artificielle "située"
Rodney Brooks (1954-) a dirigé le laboratoire du MIT[2] sur l'intelligence artificielle et a impulsé une nouvelle approche de l'intelligence artificielle.
Il pose les limites d'une approche logique, uniquement mathématique, et affirme la nécessité de concevoir des robots avec des architectures sensori-motrices. Ils seraient ainsi capables d'interagir avec leur environnement et d'apprendre par essai-erreur.
1993 Projet Cog
Débuté en 1993 au MIT[2], ce projet consiste à développer un robot humanoïde capable d'apprendre de son environnement et de s'autoprogrammer. Ce robot «tronc» ne peut marcher mais est doté via ses capteurs de la vue, du toucher et de l'audition. Il est capable de percevoir des attitudes définies chez ses interlocuteurs, et de copier des gestes simples.