1914-1953 Robots de deuxième génération
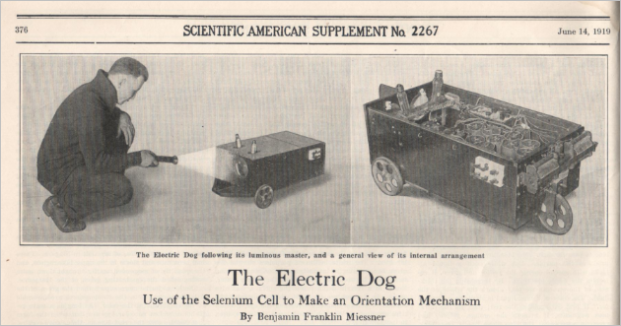
1915 Electric dog, premier robot avec capteurs
En 1915, les ingénieurs Hammond et Miessner conçoivent un chien électrique équipé d'un capteur qui le fait se diriger vers les sources lumineuses. Ils destinaient cette technologie à un usage militaire, afin que les missiles équipés de ce système visent les batteries anti-aériennes ennemies qui utilisaient des projecteurs la nuit*.
Ce «chien» adapte son comportement en fonction des informations qu'il perçoit dans son environnement. Ses inventeurs se sont inspirés de travaux du biologiste Jacques Loeb sur les réactions de phototropisme[1] des papillons de nuit.
*Miessner, B.F. (1912) The wirelessly directed torpedo. Some new experiments in an old field, Scientific American, June : 53.
1928 Philidog
Henri Piraux (1902-1979), ingénieur français, pour la société Philips, crée en 1928 le chien Philidog. Ces yeux sont des cellules photoélectriques. Motorisé, il possède deux roues motrices à l'avant et une roue à l'arrière. Une lumière projetée sur un des yeux déclenche le moteur associé, et détermine la direction du chien (droite ou gauche). Si les deux yeux sont éclairés, il avance en ligne droite devant lui. Les moteurs se coupent quand l'animal est très proche de la source lumineuse, et il émet «un aboiement».
Cette invention sera par la suite perfectionnée et il suffira d'une lampe de poche pour guider le robot.
Deux ou trois ans plus tard, le chien fut équipé de cellules et de tubes beaucoup plus sensibles, de sorte que ses mouvements pouvaient être commandés par une simple lampe de poche.
Un collage surréaliste de 1931 représente Philidog : Untitled, André Breton, Paul Éluard & Suzanne Muzard (en ligne).
Photographie publiée dans la revue Atomes, n°137, 1957
1939 Electro et Sparko
L'ingénieur américain Joseph Barnett présente Elektro en 1939 à l'exposition universelle de New-York. Cet humanoïde mesure plus de 2 mètres pour environ 120 kilos. Il peut effectuer 26 mouvements, «voit» grâce à des cellules photoélectriques et peut prononcer 700 mots.
Barnett crée ensuite le robot chien Sparko, qui aboie, s'assied et obéit à quelques ordres.

1953 Job le Renard
Albert Ducrocq (chercheur et journaliste scientifique, 1921-2001) élabore toute une série de «renards électroniques».
Parmi ceux-ci, Job est conservé au Musée des arts et métiers de Paris. Il est constitué de carton et bois, de composants électroniques et d'une peau de renard. Il possède cinq sens :
- la vue : cellules photoélectriques ;
- l'ouïe : microphones ;
- le sens de l'orientation : potentiomètre ;
- le toucher : papilles tactiles ;
- le «flair» : papilles capacitives pour détecter des obstacles à distance.
Ce robot est capable d'apprendre (« mémoire» à bandes magnétiques), et communique grâce à deux lampes (1 verte, 1 rouge) positionnées sur sa tête.
Description et illustration sur le site du Musée des arts et métiers : La cybernétique, projet de l'après-guerre : Job, le renard électronique, 1953
1953 Elsie et Elmer, les tortues de Bristol
Le neurophysiologiste anglais William Grey Walter crée deux robots mobiles autonomes, les «tortues» Elsie et Elmer (pour ELectro MEchanical Robots et Light Sensitive).
Elles se composent de 3 roues, une carapace en plastique, une batterie de téléphone, des circuits électriques, 2 capteurs et 2 moteurs. Elles sont attirées par la lumière de faible intensité, et se repèrent également grâce qu son.
Mechanical Tortoise (1951)
Vidéo en anglais présentant une des tortues de Grey, et les interactions avec son environnement (Film Pathé).
Ressources associées
Sur les interactions entre la robotique et les sciences de l'esprit et du comportement
Publication de Pierre-Yves Oudeyer, INRIA Bordeaux-Sud Ouest (non daté).
Téléchargeable [pdf] en .pdf
Cyberneticzoo
Histoire de la cybernétique animale et des premiers robots.
Site en anglais, très documenté, avec de nombreux documents d'archives.
Accessible en ligne :
- Cybernetic Creature Timeline ;
- 1912 Seleno, the Electric Dog ;
- 1928 Philidog ;
- 1937 Elektro ;
- 1951-1954 Albert Ducrocq ;
- 1953 W. Grey Walter and his Tortoises.
Cybernétique, automation, perspectives grandioses
Revue Atomes n° 137 - Octobre 1957 : numéro spécial consacré à la cybernétique.
Dei ex Machinis, p. 955-1035
Vies et œuvres de John Hays Hammond (1888-1965) et et Benjamin Miessner (1890 - 1976)
Dans son ouvrage Dei ex Machinis, Jean-Arcady Meyer retrace les vies et les œuvres des concepteurs et fabricants d'automates et proto-robots dont l'Histoire a conservé la mémoire, ainsi que les « ressorts savants » animant ces machines. Il comprend près de 1000 pages et 400 figures, et couvre une période allant des légendes anciennes jusqu'aux débuts de l'Intelligence Artificielle.